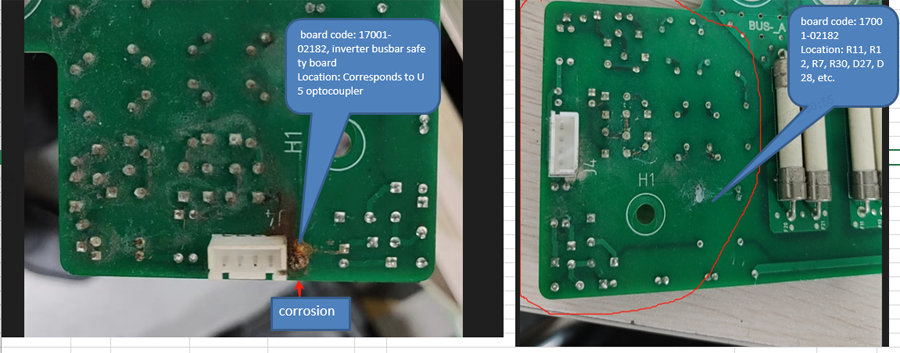
1. When the after-sales personnel are maintaining the HT33040XL and DT3340XL machines, if they find that the board on the machine is defective, the board code is 17001-02182, the inverter busbar safety board. They should pay more attention to these positions: whether the U5 optocoupler, R11, R12, R7, R30, D27, D28, etc. are corroded, because this board is in the air outlet, it is easy to corrode. See the picture.
2. If corrosion is found, please note in the shipping list that these positions should be covered with white glue for protection. White glue code: 39002-00030
Fixative adhesive: hot melt adhesive strip: softening point: about 105℃ + 5℃: viscosity: 180℃ / 16000CPS: milk white: 8811A: ROHS: R.
1. Connect the equipment to the MTR software and make changes to the maintenance period of the power module's capacitors/fans in the "Service Settings" -> "System Settings".
2. Users can use the V1.98C version of the MTR software. In the controlCmd function (password: 12345678) -> Module Operation Command Menu, select the corresponding module and clear the working time of the electrolytic capacitors/fans in the power module.
Q: The DC fan inside the UPS I purchased from your company has recently started making abnormal noise. What is the reason?
A: The main causes are either the fan speed level has been set to Level 2 via the MTR software, or one or more DC fans inside the UPS have malfunctioned.
Q: However, there is no fan fault alarm code displayed on the UPS. How can this be explained?
A: In some cases, the "Fan Fault" alarm has been disabled via the MTR software, which is why the code is not shown.
Q: How can I resolve the fan abnormal noise issue?
A: Please follow the solutions below:
1.Connect to the UPS using MTR software and configure the parameters as follows:
1)Path 1: ServSetting → System Setting → 3-level Fan Speed Control → Select Enable
Note: If set to Disable, fan speed will increase significantly, resulting in louder noise.
2)Path 2: Rated Setting → System Code Setting 1 → Check FanFailBzOnEn → Restart the equipment.
After rebooting, check if fault code 53 (fan fault code) appears on the UPS screen.
Note: If a fan fault or code 53 occurs, the fan will run at maximum speed, causing increased noise.
Summary:If 3-level fan speed is enabled and fan fault alarm is checked, the fan will operate at the lowest speed level and noise under normal working conditions.
FAQs for Abnormal Noise from DC Fan
Applicable Equipment Models: HTX 06–20KVA
Q: The DC fan inside the UPS I purchased from your company has recently started making abnormal noise. What is the reason?
A: The main causes are either the fan speed level has been set to Level 2 via the MTR software, or one or more DC fans inside the UPS have malfunctioned.
Q: However, there is no fan fault alarm code displayed on the UPS. How can this be explained?
A: In some cases, the "Fan Fault" alarm has been disabled via the MTR software, which is why the code is not shown.
Q: How can I resolve the fan abnormal noise issue?
A: Please follow the solutions below:
1.Connect to the UPS using MTR software and configure the parameters as follows:
1)Path 1: ServSetting → System Setting → 3-level Fan Speed Control → Select Enable
Note: If set to Disable, fan speed will increase significantly, resulting in louder noise.
2)Path 2: Rated Setting → System Code Setting 1 → Check FanFailBzOnEn → Restart the equipment.
After rebooting, check if fault code 53 (fan fault code) appears on the UPS screen.
Note: If a fan fault or code 53 occurs, the fan will run at maximum speed, causing increased noise.
Summary:If 3-level fan speed is enabled and fan fault alarm is checked, the fan will operate at the lowest speed level and noise under normal working conditions.
Switch to English by opening the software in administrator mode. If this does not resolve the issue, please contact the INVT engineer. Email address: support@invt.com.cn
Add New relay function P06.00~P06.21 = 92: MV switch-on allowed
+ Operational logic:
IF (Control power on = true)
AND (VFD fault = false)
AND (Emergency stop button off = true)
THEN
Relay output := 1;
ELSE
Relay output := 0;
In MVD ARM Software V3.08, a feature has been added that allows the system to automatically issue a closing command.
Troubleshooting steps:
1 This fault occurs during the EEV pressure equalization phase. When this alarm appears, the EEV cannot complete initialization, and the unit cannot enter cooling or dehumidification mode.
2. When this alarm occurs, first check the suction pressure and discharge pressure values in the sensor status. Based on the refrigerant type and current temperature, consult the corresponding saturation pressure-temperature chart to verify whether the pressures are too high or too low.
3. Check whether all valves in the unit are fully opened, including solenoid valves, check valves, ball valves, and indoor/outdoor unit service valves. Remove the pressure sensors and inspect them for oil blockage; clean them if necessary.
4. Connect a pressure gauge and compare its readings with the values displayed on the controller. If there is a significant deviation, it is likely that the pressure sensor is faulty. If other alarms are present at the same time, contact the manufacturer for further assistance.
Troubleshooting steps:
1. In the status menu, go to Equipment Status – Humidifier Runtime and check the actual humidifier runtime.
2. If the actual runtime exceeds 2000 hours (default value), the humidifier requires cleaning and maintenance. After maintenance is completed, log in with the service password 504600, locate the time reset option, and clear the humidifier runtime. Then, confirm in the status menu that the humidifier runtime has been reset to zero, and manually clear the alarm.
3. If the actual runtime is less than 2000 hours (default value), the cause may be a protocol error, outdated software version, or an alarm threshold set too low. In this case, provide the software version number and serial number (SN) and contact the manufacturer for assistance.
FAQ For INV IGBT Driver Block-Set Alarm
Applicable Equipment Model:RMX 40/50X
Q: The equipment suddenly reports an "INV IGBT Driver Block-Set" fault. What is the cause?
A: The main cause is abnormal inverter voltage or abnormal voltage detection.
Q: How should we troubleshoot and resolve this fault?
A: Please follow the inspection steps below:
1. Check the inverter power board
* Inspect the inverter power board of the power module for obvious burn marks.
* Check whether key components (such as inverter driver / inverter IGBT) are damaged.
Recommendation: If a spare inverter power board is available, power off the equipment first, replace the board, then restart the unit to check if the alarm is cleared.
2. Check the inverter busbar board
* Inspect the inverter busbar board for obvious damage.
* Check whether the fuse on the inverter busbar board is blown.
Recommendation: If a spare inverter busbar board is available, power off the equipment first, replace the board, then restart the unit to check if the alarm is cleared.

Our site uses cookies to provide you with a better onsite experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Cookie Policy.