Yes.INVT MVD has this function. When the grid line power off briefly 0.1s-5s,the MVD can continue drive motor without fault.
Because when MVD drive motor running at 25-35Hz,the speed of the motor and load reach at resonance frequency point,so the MVD output current vibration is huge. At this time, we can setting jumping frequency to aviod this resonance frequency point.
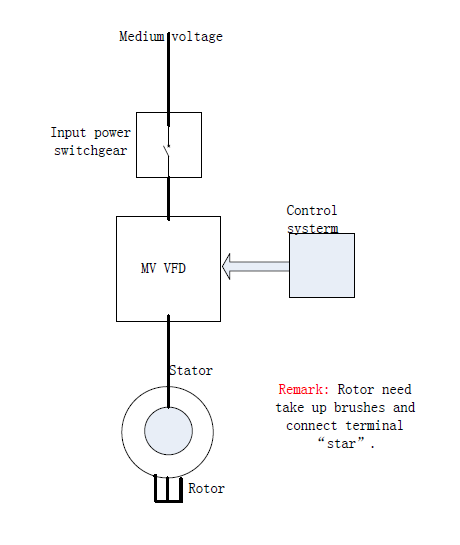
Yes.INVT MVD can drive slip-ring motor.
But need change the slip-ring motor rotor connection and remove brush.
Right diagram is reference for slip-ring motor renovation.
The INVT MVD don't need input and output filter.
Because INVT MVD use shiffting transformer and multi-level output principle,it can counteract below 50th odd harmonic so the VFD input and output harmnic is low(THD less than 4%), input power factor is high (>0.97)and output du/dt is low,so it don't need input and output filter.
INVT MVD principle is multi-level output;
Take 6kv voltage for example,each phase has 5 pcs power cells, so the output level is:(2*5)+1=11 levels.
The formula is :Output level=(2*N)+1, the N is each phase power cell numbers.
INVT MVD principle is multi-level output;
Take 3kv voltage for example, each phase has 3 pcs power cells and each power cell has 6 pluses,so for 3kv MVD, the input pluses are 3*6= 18 pluses.
The formula is :Input pluses=6*N, the N is each phase power cell numbers.
Designed in comp;iance with the strictest requirements of IEEE 519 1992 voltage and current harmonic distortion standards.
Support unit bypass.There are manual bypass, automatic bypass and neutral point drifting bypass.
The rated voltage of the power unit is 690VAC.

Our site uses cookies to provide you with a better onsite experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Cookie Policy.