1. Determine whether to restart the rotating motor. If so, you can wait until the motor stops stably or enable the speed tracking function.
2. Check whether the acceleration time of the VFD is too short or not, and extend the acceleration time. If the process of the customer allows, advised to replace the inverter with a higher power VFD.
3. Confirm whether the load of VFD changes suddenly during acceleration. If so, the protection value or acceleration time can be increased.
4. Check whether the output voltage is low while at 50Hz, and adjust the no-load current of the motor to make the output voltage reach 380V.
5. Check whether the output cable is too long. Generally more than 50m, output reactor or filter should be installed; generally, reactor should be added to submersible pump, and OC1 is easy to trip without reactor.
6. Check motor insulation.
Possible causes of failure:
1. The short-circuit connection jumper between terminal 24 V and PW is lost;
2. The voltage of terminal 24 V is abnormal;
3. The terminal is damaged;
4. The terminal polarity is set incorrectly;
5. Some parameter setting is improper, please reset to factory parameters, then test.
DI: 59 Brake feedback signal
After set DI 59 brake feedback signal, when the brake open, after P19.24 detection time, still not receive brake feedback signal, VFD will report FAE fault.
Note: Brake open/release need operation time, not suggest to set too short time.
P27.14≠0, will active low speed protection
If VFD running speed is less than P27.15 setting, and status keeping time reach P27.14, report LSP fault.
When DC bus voltage reduce, VFD reduce the output frequency to ensure the output torque. P27.02=1 active protection, if DC bus voltage is less than P27.03*513VDC, reduce the output f. f/hz=rated Hz*Current DC bus voltage/rated DC bus voltage.
When DC bus voltage reduce and reach the set point, VFD DEC. stop and display A-LvP fault. Until DC bus voltage back to P27.01*motor rated voltage + 20Vdc, reset automatically.P27.00=1 active lower voltage protection.
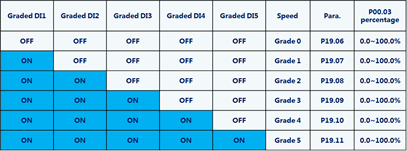
Graded multi-step speed is special for GD20-09, different from multi-step speed function of universal purpose series. Only all lower graded step is ON, the high graded step is avlid.
Active function by P19.37=1, P19.37 can be used together with P05 group input terminal function 60 (Operating lever zero-point position signal) to conduct operating lever zero-point position detection. When the VFD stops, if the operating lever zero-point position signal is enabled (operating lever zeroing), timing starts. At this moment, if operating lever upward or downward running command exits, the VFD does not respond to the command, but if P19.38 is reached, an operating lever fault (StC) will be reported. If the counting time reaches P19.38, it indicates that the zero position is detected uccessfully. The zero position signal is released, and the VFD responds only after being given with the operating lever upward/downward command. In the situation that the zero position signal is not released, if the operating lever upward/downward command is given, an operating lever fault (StC) will be reported. After the VFD stops, the operating lever zeroing starts timing andlasts until P19.38 is reached. Valid running command can be given again only when the zero position is detected successfully.
Generally, it is caused by improper cooperation between the brake and the VFD. The frequency of the VFD has increased, but the brake is opened slowly, resulting in excessive current. This problem is particularly easy to occur in the site where the brake is not controlled by the VFD. The best solution is that the brake is controlled by the VFD.

Our site uses cookies to provide you with a better onsite experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Cookie Policy.