1.Introducción de equipo
Las prensas de impresión automáticas de pasta de soldadura generalmente se componen de montaje de placa de impresión, pasta de soldadura, estampado, placas de circuito de transmisión y otras instituciones.Su principio de funcionamiento es: Primero, fija la placa de circuito impreso en la mesa de posición de impresión y luego usa el raspador izquierdo y derecho en la prensa de impresión para imprimir pasta de soldadura o plástico rojo en la almohadilla correspondiente a través de la fuga de red de acero. A través de la estación de transmisión, ingrese el PCB impreso uniformemente a la máquina de parche para parche automático. Este equipo de doble eje es la estructura del pórtico conectada por la palanca de tornillo , manteniendo la misma velocidad en ambos lados en el proceso de posicionamiento de alta velocidad, lo que requiere servo con función de sincronización de pórtico.

Figura 1
2. Breve introducción de sincronización de pórtico
El uso de la sincronización de pórtico se enfoca en controlar el movimiento de velocidad constante de las dos plataformas móviles. Si el movimiento entre los dos ejes existe demasiada diferencia, causará daños al mecanismo, por lo que la sincronización de control de movimiento entre dos ejes es la primera prioridad de uso de sincronización del pórtico.
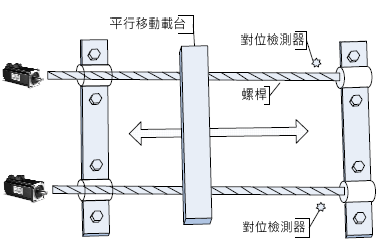
Figura 2
La función de control síncrono de pórtico proporcionada por la serie DA200 de INVT permite al usuario cumplir satisfactoriamente los requisitos. El conductor se controlará sincrónicamente. Cuando la desviación de la posición exceda el valor permitido, se emitirá una advertencia para detener el funcionamiento del sistema. P4.33 [Ámbito de pulso de tolerancia de posición] puede establecer el umbral de tolerancia de posición de alarma. Un punto importante del control síncrono del pórtico es garantizar primero el paralelismo del pórtico izquierdo y derecho. El primer paso es enderezar el pórtico a través de la función de referencia. Durante el proceso de referencia, la computadora host solo da una señal de referencia a los servos izquierdo y derecho. Después de tocar los dos interruptores de origen a la izquierda y a la derecha, las siguientes acciones sirve para completar la acción de referencia; primero, la computadora host devuelve al maestro y al esclavo la señal de origen respectivamente, el maestro (esclavo) toca primero el sensor de origen después de la parada, espere a que el esclavo toque el sensor de origen. Después de que las dos señales sean válidas al mismo tiempo, corra hacia atrás 1 círculo (P6.38 = 10000) al mismo tiempo y luego corra hacia adelante nuevamente hasta que el interruptor del sensor se detenga, y durante el regreso al origen, el maestro siempre libera la señal del pórtico esclavo, y la señal de sincronización del pórtico se da después de que se completa la alineación; después de que se completa la alineación del marco del pórtico, la computadora host finalmente da la señal de referencia mecánica; DA200 ha incorporado 6 tipos de aplicaciones de referencia bajo diferentes controles industriales El modo es para que los clientes elijan.
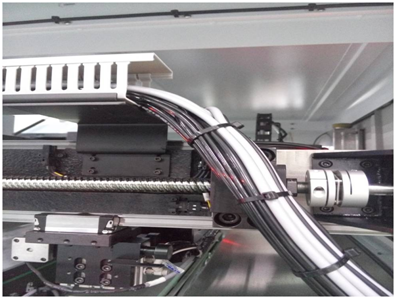
Figura 3
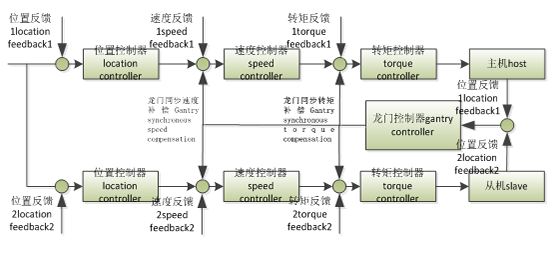
3. Principio de control de pórtico:
Como se muestra en la figura a continuación, el controlador de sincronización de pórtico leerá las señales de posición de la computadora maestra y esclava en tiempo real para obtener la diferencia de posición y velocidad entre la computadora maestra y la esclava, luego emitirá los comandos de compensación de velocidad y par para lograr la sincronización operación de computadora maestra y esclava.
Configura el P6.31 del host a P6.35 de acuerdo con el sistema real.

4. Cableado eléctrico:
Host: Señal de pulso. Salida divisoria de frecuencia esclava. Servoalarma. Inicio de origen (DI1). Sensor de origen (DI2). Finalización de referencia (D01). Liberación de sincronización de pórtico (DO2)
Esclavo: Señal de pulso. Salida de frecuencia de host. Servoalarma. Sensor de origen (DI2) Liberación de sincronización de pórtico (DI3)
| Host connection | |||||
| Angular position | definition | ||||
| 23 | PULSE+ | ||||
| 24 | PULSE- | ||||
| 32 | SIGN+ | ||||
| 33 | SIGN- | ||||
| 2 | V24+ | ||||
| 12 | V24- | ||||
| 15 | fault alarm | ||||
| 44 | 0A+ | 3 | EXA+ | Slave CN5 terminal | |
| 43 | OA- | 4 | EXA- | ||
| 41 | OB+ | 10 | EXB+ | ||
| 42 | OB- | 9 | EXB- | ||
| 16 | host is reset to zero | ||||
| 37 | Host origin switch | ||||
| 9 | gantry releasing | Output to the slave | |||
| 14 | Homing is completed | ||||
| 10 | Slave origin switch | ||||
| Slave wiring | |||||
Angular position definition
| 23 | PULSE+ | ||||
| 24 | PULSE- | ||||
| 32 | SIGN+ | ||||
| 33 | SIGN- | ||||
| 2 | V24+ | ||||
| 12 | V24- | ||||
| 15 | fault alarm | 3 | EXA+ | Host CN5 terminal | |
| 44 | 0A+ | 4 | EXA- | ||
| 43 | OA- | 10 | EXB+ | ||
| 41 | OB+ | 9 | EXB- | ||
| 42 | OB- | ||||
| 16 | slave is reset to zero | ||||
| 10 | gantry releasing | Receive host input |
5. Pasos de depuración de servos
5.1.P6.30 interruptor síncrono de pórtico abierto;
5.2 Determinar el host y el esclavo de acuerdo con el cableado del puerto IO (P6.37)
5.3. P4.62 dirección de la regla de rejilla consistente con la dirección del motor;
5.4. Aprendizaje en línea inercia mecánica (la relación de inercia mecánica de carga en tiempo real se puede observar por R0.51)
5.5. Ganancia de depuración según la situación real;
5.6. Establecer los parámetros P4.64 según la situación (vea el valor de desviación de la posición de sincronización del pórtico a través de R0.53)
5.7 De acuerdo con la situación real, decida si necesita invertir la dirección de alineación de sincronización de pórtico (P6.41) y la contraposición de sincronización de pórtico a distancia (P6.37)
Los parámetros específicos se establecen de la siguiente manera:
| host | slave | |||
| P0.22=10000 | pulse per revolution | P0.22=10000 | pulse per revolution | |
| P0.24=1 | reversed negation | P0.24=1 | reversed negation | |
| P1.01=600 | inertia ratio | P1.01=600 | inertia ratio | |
| P3.00=0X108 | Return to zero | P3.00=0X108 | Return to zero | |
| P3.01=0X02E | Host origin switch | |||
| P3.02=0X02F | Slave origin switch | P3.02=0X02D | Gantry releasing | |
| P3.05=103 | enabling | P3.05=103 | enabling | |
| P3.10=0X00F | Homing is completed | |||
| P3.11=103 | The alarm polarity is reversed | P3.11=103 | The alarm polarity is reversed | |
| P3.14=0X01E | Gantry releasing | |||
| P4.64=1000 | Mixing deviation is too large | P4.64=1000 | Mixing deviation is too large | |
| P6.30=1 | Gantry synchronization function switch | P6.30=1 | Gantry synchronization function switch | |
| P6.33=48 | Synchronous position control gain | P6.33=48 | Synchronous position control gain | |
| P6.37=1 | Gantry synchronization master and slave selection | P6.37=0 | Gantry synchronization master and slave selection | |
| 6.38=1500 | Gantry synchronization contraposition backwards distance | P6.38=1500 | Gantry synchronization contraposition backwards distance | |
| P6.41=1 | Gantry synchronization contraposition direction | P6.41=1 | Gantry synchronization contraposition direction | |
| take effect after changing the parameters and turning off the power |
6. Resumen del programa de sincronización de pórtico:
6.1 Función de sincronización de pórtico incorporada DA200, simplifica el controlador superior, reduce los costos de control;
6.2. Alta precisión, precisión de posicionamiento de repetición 1 mm
6.3 Operación segura y confiable, cuando cualquier servo host o esclavo alarma, el pórtico se detiene inmediatamente;
6.4 La depuración síncrona es conveniente.






Nuestro sitio utiliza cookies para brindarle una mejor experiencia en el sitio. Al continuar navegando por el sitio, acepta nuestro uso de cookies de acuerdo con nuestra Política de cookies.












 Compartir
Compartir
 Facebook
Facebook
 Twitter
Twitter
 Google+
Google+
 LinkedIn
LinkedIn
 Lista de devoluciones
Lista de devoluciones

