Resumen: Este artículo presenta principalmente el esquema de control del robot utilizando el servosistema de AC de alta función de la serie DA200 de INVT, que tiene las ventajas de una alta precisión de control, alta estabilidad del sistema y una operación flexible del usuario. La excelente precisión de posicionamiento y la respuesta de velocidad líder en la industria del servo INVT han ganado el reconocimiento de los clientes.
Palabras clave: servo de la serie DA200 de INVT, manipulador de seis ejes, posicionamiento preciso, alta estabilidad
1. Introducción
El manipulador es un dispositivo automático que imita los movimientos de las manos humanas y realiza el agarre, transporte y operación automáticos de acuerdo con los procedimientos, trayectorias y requisitos establecidos. Es especialmente utilizado en entornos malos tales como alta temperatura, alta presión, polvo, inflamabilidad, explosivos, radiactividad y otras operaciones pesadas, monótonas y frecuentes.
Los manipuladores son una rama importante de los robots industriales. Se caracteriza por poder completar varias tareas esperadas a través de la programación, combinando las ventajas del hombre y la máquina en términos de construcción y rendimiento, especialmente reflejando la inteligencia humana y la adaptabilidad. El manipulador puede automatizar el control de posicionamiento y puede reprogramar para cambiar la máquina multifunción, y tiene múltiples grados de libertad, puede usarse para transportar objetos para completar el trabajo en diferentes entornos. La precisión de las operaciones de manipulador y la capacidad de completar operaciones en diversos entornos tienen amplias perspectivas de desarrollo en diversos campos de la economía nacional.
2. Introducción de la estructura principal del manipulador
Los tipos de manipuladores se pueden dividir en manipuladores mecánicos, neumáticos, hidráulicos y eléctricos de acuerdo con el método de conducción; de acuerdo con el alcance de la aplicación, se pueden dividir en dos tipos: manipuladores especiales y manipuladores generales; de acuerdo con el método de control de la pista de movimiento, se pueden dividir en manipulador de control de trayectoria de control de punto y continuo, etc.
2.1 Robot de coordenadas cilíndricas
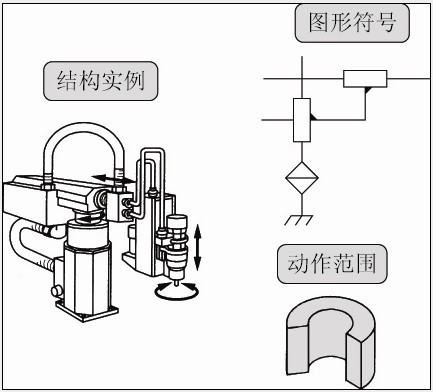
Figura 1
Como se muestra en la Figura 1, el robot se compone de una rotación y dos traslaciones. La columna completa se puede girar, el brazo se puede subir o bajar a lo largo de la columna, y el brazo se puede extender o retraer. El radio de rotación cambia con los requisitos del trabajo.
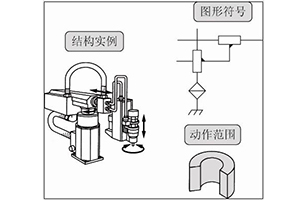
2.2 Robot de coordenadas esféricas
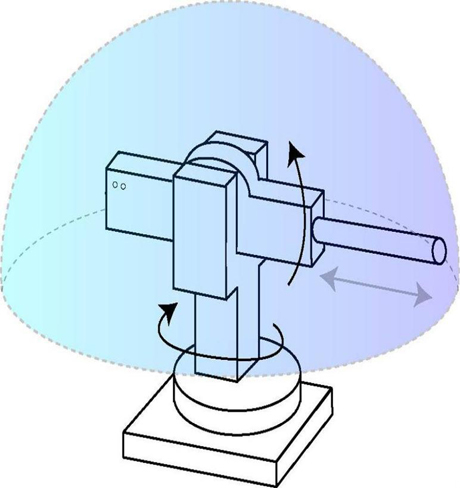
Figura 2
Como se muestra en la Figura 2, C es el centro de rotación de este brazo. Este brazo se puede extender y acortar, y el centro de rotación también se puede girar. Este rango de movimiento debe ser una bola hueca, ya que el brazo no puede barrer un círculo idealmente, esta bola es una bola rota. Esta estructura es más fácil de alcanzar en los agujeros inclinados hacia arriba y hacia abajo que otras estructuras. Cuando se necesita este tipo de demanda, se debe dar prioridad al robot de tipo de coordenadas esféricas.
2.3 Robot de coorfenadas cartesianas

Figura 3
Como se muestra en la figura 3, el robot consta de dos rieles de guía perpendiculares entre sí y un riel de guía perpendicular a los dos rieles de guía verticales en él, formando un sistema tridimensional de coordenadas rectangulares, es decir, ejes x, y y z. Este robot tiene una estructura simple (sin rotación y oscilación), por lo que la precisión de fabricación puede ser muy alta, y el método de cálculo de la trayectoria en el controlador también es muy simple. El rango de trabajo es amplio y puede usarse como un vehículo de transporte a gran altitud, que puede realizar un movimiento de alimentación lineal al horno u otro equipo de cavidad.
La máquina de medición de coordenadas también es un robot de tipo coordenada rectangular.
2.4 Robot en paralelo

Figura 4
Este es un nuevo tipo de robot estructurado, que proporciona la trayectoria del final a través del movimiento compuesto de cada pieza para completar diferentes tipos de operaciones. La estructura del robot se caracteriza por una buena rigidez y se puede utilizar para completar algunas funciones de la máquina herramienta CNC, por lo que también se denomina máquina paralela.
En la actualidad, existen prototipos que pueden completar el procesamiento de superficies curvas complejas, especialmente el procesamiento fino. Es una nueva forma estructural de máquinas herramienta CNC y una extensión de las funciones del robot. Sin embargo, su cálculo de control es muy complicado, y el rango de trabajo también es muy pequeño, y su precisión es actualmente menor que la de las máquinas herramienta CNC.
2.5 Robot articulado de seis ejes

Figura 5
El robot articulado se compone principalmente de rotación y grados de libertad de rotación, y puede considerarse como una estructura de brazo similar a la humana. La parte desde el codo hasta la raíz del brazo se llama parte superior del brazo, y la parte desde el codo hasta la muñeca se llama antebrazo. Esta estructura es más efectiva para cualquier posición y postura en un espacio tridimensional definido. Tiene buena adaptabilidad a varias operaciones, la desventaja es que el cálculo y el control de coordenadas son más complicados y es difícil lograr una alta precisión.
3. Introducción del programa de aplicación
3.1 La estructura integral del equipo:

Figura 6
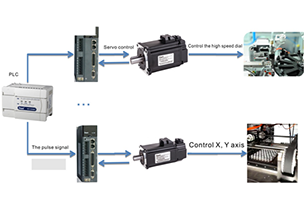
3.2 Diagrama de composición del sistema eléctrico:
Esta vez, el cliente utilizó 6 servosistemas de AC de alta función de la serie de DA200 de INVT, controlados por un controlador inteligente INVT.
DA200 es un servo producto estrella construido por INVT con grandes avances en función. El DA200 tiene una respuesta de velocidad de hasta 2.0kHz, una variedad de algoritmos avanzados, fuertes capacidades de supresión de vibraciones, velocidad rápida de seguimiento de comandos de destino, alta precisión de posicionamiento, cámaras electrónicas incorporadas, control de puntos y otras funciones. Es fácil de depurar y adaptar a cualquier controlador de robot conjunto.
El diagrama esquemático eléctrico se muestra a continuación:

Figura 7
Método de cableado específico:
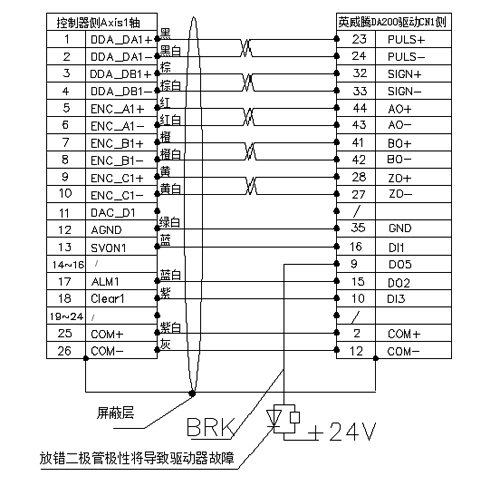
Figura 8
Requisitos de cableado: la conexión entre el sistema y el controlador requiere un cable blindado de par trenzado 2 * 8, y el cable del sistema de frenos está conectado a la placa del freno con un cable blindado 1 * 2, y la carcasa debe estar bien conectada a la pantalla. El AGND del controlador debe estar conectado al GND del servo, de lo contrario, el hardware del controlador puede dañarse.
3.3 Depuración de parámetros
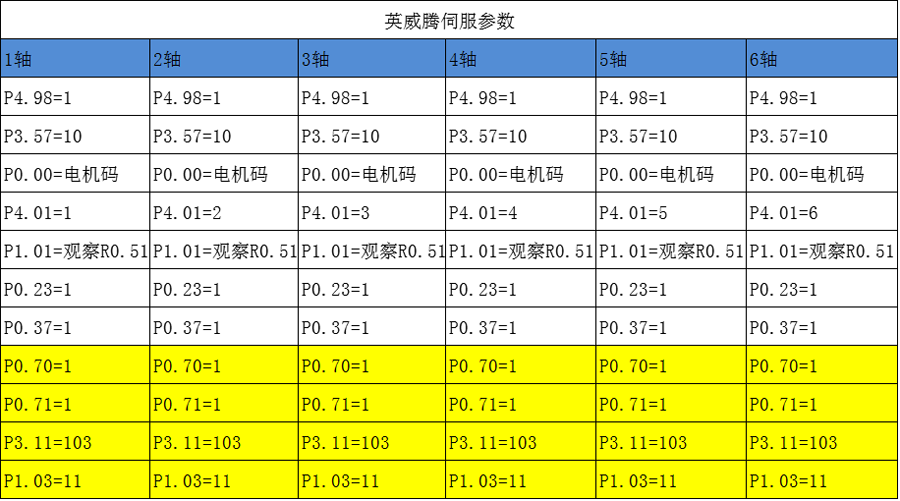
Figura 9
Inercia, observa el llenado de R0.51 o el autoaprendizaje a través de P1.04, el control no debe exceder 2000; la rigidez se puede ajustar de acuerdo a las necesidades, pero los ejes deben ser consistentes.
4. Conclusión del proyecto
1) El esquema de control de manipulador del servo sistema de AC de alta función del British de la serie DA200 de INVT tiene las ventajas de una alta precisión de control, alta estabilidad del sistema y una operación flexible del usuario. Puede ser ampliamente utilizado en varios campos de automatización industrial para crear valor para los clientes y mejorar la eficiencia del equipo;
2) El desarrollo de robots ha mejorado continuamente la precisión del posicionamiento repetido del equipo, y ha alcanzado los requisitos de alta precisión de ± 0.03 mm, mientras que DA200 tiene una excelente precisión de posicionamiento, y la precisión de posicionamiento repetido ha alcanzado una alta precisión de ± 0.01 mm, que cumple completamente con los altos requisitos de los robots. Demanda refinada;
3) Después de enseñar al robot, cada eje registra la ruta recorrida en su propia memoria. Al reproducir, se alcanza la posición grabada. Este es el principio básico de la reproducción repetida de robots. La excelente función del servo sistema de la serie DA200 de INVT garantiza completamente la flexibilidad y precisión de los movimientos del robot, y esto es lo que busca el posicionamiento repetido del robot;
4) DA200 tiene ajuste de ganancia automático, es conveniente y rápido para optimizar el rendimiento del servo de cada junta.



Nuestro sitio utiliza cookies para brindarle una mejor experiencia en el sitio. Al continuar navegando por el sitio, acepta nuestro uso de cookies de acuerdo con nuestra Política de cookies.













 Compartir
Compartir
 Facebook
Facebook
 Twitter
Twitter
 Google+
Google+
 LinkedIn
LinkedIn
 Lista de devoluciones
Lista de devoluciones

