In the deep night, accompanied by the majestic and bright "Radeski March", the second largest musical fountain - Donggang music fountain begins to change into a jumping curtain in Dalian Donggang Business District Music Fountain Square, playing a gorgeous movement.
The fountain’s floor area is 9000 square meters, fountain height is different from 15 meters to 80 meters, it can be a separate jet, accompanied by acoustic photoelectric, presenting one after another exquisite audiovisual feast for Dalian residents and tourists from all around the world.

Equipment profile
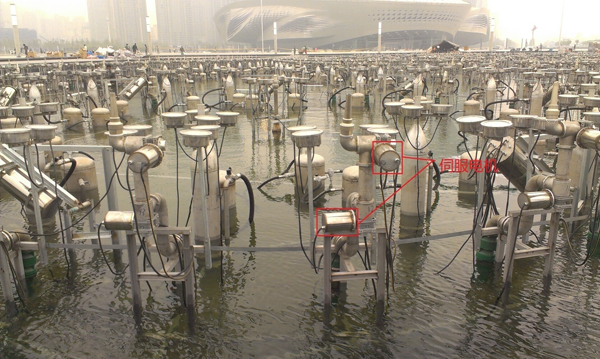
Large music fountain is composed of a number of nozzles, gas guns, laser lights, music and other components, generally hundreds or even thousands.
Each nozzle is an independent individual, 2-dimensional (2-axis) control, the inverter drives the pump for fast water spray with different height.
The servo is applied in the rotary motion of nozzle. Servo motor + reducer drive, an output shaft horizontal to the ground, an output shaft perpendicular to the ground, forming a controlled two-dimensional water column.
Control system uses music fountain dedicated controller, single card control 4 axis, pulse control, to achieve the operation of servo motor.

Application scheme introduction
The servo drive system software is the dedicated software.
Achieve sensorless homing function in the action.
In a variety of state, homing regression action can be achieved. Such as after fault reset, power failure in the running process etc.,
Automatically returning to the original point after power on can be achieved. realization of the function is not affected in the case of the installation of reducer.

Servo commissioning and parameter setting
Function debugging
Set P4.11 to return to the origin according to the position saved at the time of last power failure
Set P4.12 to automatically find the origin after power on.
Set the speed reduction ratio of P4.23 actual reducer.
Set P4.29 origin position (arbitrary position), it’s the origin after setting.
Complete functional parameters setting, due to the non-standard software, there are some parameters can be applied, no one by one list here.

Performance debugging
Inertia adaptive adjustment, because the mechanical structure are consistent, user just needs to learn a motor, the other is the same. Adjust P1.02 is ok.
Adjust the rigidity parameter P1.03 to the appropriate value according to the mechanical characteristics.



Our site uses cookies to provide you with a better onsite experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Cookie Policy.
















 Share
Share
 Facebook
Facebook
 Twitter
Twitter
 Google+
Google+
 LinkedIn
LinkedIn
 Return list
Return list