Resumo: Este artigo apresenta principalmente a máquina integrada inteligente INVT EC160A usada para retrofitting do elevador KONE na Índia. Ele fornece a solução detalhada de retrofitting para o elevador KNOE e detalhes de comissionamento. A prática de engenharia mostra que a máquina integrada inteligente INVT EC160A tem bom desempenho de controle e estabilidade no elevador KNOE.
Palavras-chave: EC160A, modernização de elevadores KNOE, máquina integrada inteligente.
I. Introdução
O elevador KONE é a marca top 5 de elevadores do mundo e tem uma grande participação de mercado na Índia. A KONE tem seu próprio sistema de controle especial e motor. Eles não são compatíveis com outros sistemas de controle e motor de marca. Então a KONE dominou o mercado de serviços de pós-venda. Qualquer peça quebrada, os usuários finais têm que ir com peças de reposição caras da KONE. Então os usuários reclamam muito, mas não há outra escolha.
Agora a INVT desenvolveu a máquina integrada inteligente de elevador EC160A que pode acionar o motor KONE e substituir todo o sistema de controle. Ela pode quebrar o monopólio da KONE no mercado de serviços pós-venda. A máquina integrada inteligente de acionamento de elevador EC160A tem os seguintes recursos.
Desempenho básico
• Redução de recursos na instalação, depuração, operação e gestão do elevador.
• Velocidade máxima: 6m/s Piso máximo: 64
• O controle de grupo de rede inteligente pode controlar 8 elevadores ao mesmo tempo
• Tecnologia de compensação inicial de alto desempenho incorporada de sensor sem ponderação
• Cálculo avançado de vetor espacial e compatibilidade com o codificador do motor AM/SM
• Controle vetorial de corrente de alto desempenho, saída de torque de 180% em velocidade zero
• Modo de emergência-resgate de baixa tensão do UPS monofásico AC220V, busca a direção em carga leve
• Entrada de hardware de segurança em conformidade com os padrões EN81
Funções especiais
• Suporta comunicação serial e paralela.
• Terminal manual: interface homem-máquina autônoma, sistema de ajuda on-line em chinês/inglês; funções de gerenciamento de depuração, gerenciamento de rastreamento de depuração, upload/download de parâmetros, cópia de dados do computador
• O terminal manual pode ser conectado à interface CAN no carro para configuração conveniente de parâmetros
• Adicionar módulo de internet TCP/IP para depuração e controle remotos
• Suporta controle remoto do protocolo TCP/IP
II. Configuração do elevador KONE
Há uma decolagem fora de serviço devido a falha na negociação do AMC.
Guia 1 Informações sobre o elevador
| Velocidade de elevação | 1,0 m/s |
| Capacidade | 6 pessoas, 408KG |
| Andares | 7 andares |
| Tensão de alimentação | Trifásico 415V |
| Tipo de motor | Motor síncrono |
| Potência nominal do motor | 3,7 kW |

Fig 1 Painel de controle KONE e VFD
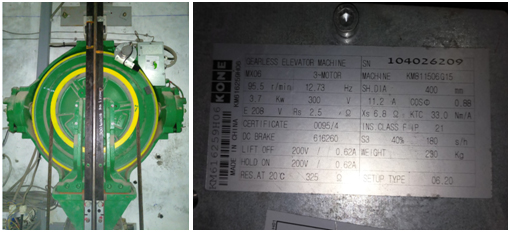
Fig 2 Motor KONE e placa de identificação do motor
III. Solução EC160A para modernização de elevadores KONE
1. Configuração elétrica EC160A
De acordo com a configuração do elevador e as funções exigentes, fornecemos a solução elétrica como segue. Considerando a temperatura ambiente mais alta, um grau mais alto de classificação de máquina inteligente é selecionado.
Aba 2 Lista de configuração
| Item | Modelo | Qtd. |
| Máquina integrada EC160 | EC160A-5R5-4 | 1 |
| Painel portátil | EC-PAD | 1 |
| Encoder | 8.5000.0000.1024.S026.0070 | 1 |
| Sensor | PF125-8DN | 1 |
| Display de exibição e chamada | 7 segmento | 8 |
| Resistor de frenagem | 50Ω/2000W | 1 |
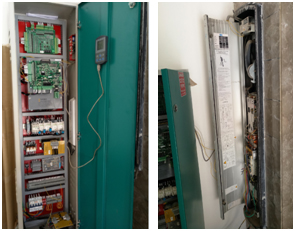
Fig 3 Painel de controle EC160A
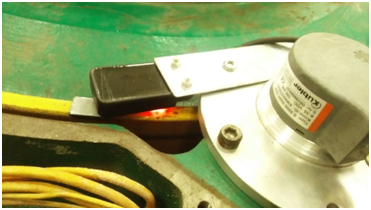
2. Retrofitting do encoder
2.1 Instale o encoder conforme mostrado na imagem abaixo:

2.2 Utilize o parafuso M3 para fixar o sensor no suporte, conforme mostrado na imagem abaixo:
2.3 Use o parafuso M4 para fixar o suporte na placa de flange do codificador. O sensor deve estar sob o suporte perto do lado da roda do motor, como mostrado na imagem abaixo, e use cola para fixar o ímã:

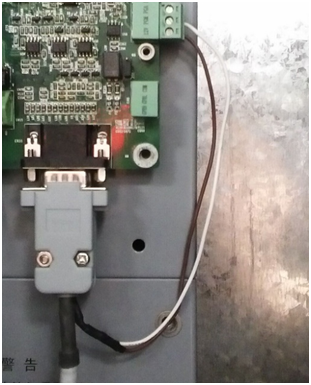
2.4 Conecte o sinal do sensor ao EC160A SUDZ e o cabo de alimentação ao 24+ e 24-:
2.5 Faça a conexão do cabo do encoder de acordo com a lista abaixo
| EC160A CN10(DB15) | Sinal do encoder | EC160A CN9 |
| 1 | B- | / |
| 5 | AA | / |
| 6 | UM- | / |
| 7 | 0V | PGM |
| 8 | B+ | / |
| / | +UB | 12V |
3. Configuração de parâmetros EC160A
A configuração dos parâmetros básicos é a seguinte.
| Código de função | Nome | Descrição | Definindo Valor |
| P0,00 | Modo de controle | 1, Controle vetorial com PG | 1 |
| P0,01 | Velocidade nominal do elevador | 0,100~6,00 m/s | 1 |
| P0,02 | Velocidade máxima do elevador | 0,100~P0,01 m/s | 1 |
| P0,03 | Frequência de saída máx. | 10,00~400,00Hz | 12,73 |
| P0,04 | Diâmetro da polia de tração | 100~2000mm | 400 |
| P0,05 | Taxa de redução | 1,00~60000 | 16666 |
| P0,06 | Razão de suspensão da corda | 1~8 | 2 |
| P1,00 | Aumentando a conta 1 | 0,001~1,000m/s3 | 0,2 |
| P1.01 | Aumentando a conta 2 | 0,001~1,000m/s3 | 0,2 |
| P1.02 | Velocidade de aceleração | 0,001~1,000m/s2 | 0,4 |
| P1.03 | Reduzindo dec 1 | 0,001~1,000m/s3 | 0,2 |
| P1.04 | Reduzindo dec 1 | 0,001~1,000m/s3 | 0,2 |
| P1.05 | Velocidade de dec | 0,001~1,000m/s2 | 0,4 |
| P1.06 | Área da porta | 0~1000mm | 100 |
| P2,00 | Seleção do tipo de motor | 0: Motor assíncrono | 0 |
| P2.01 | Potência nominal do motor | 0,1~150,0 kW | 3.7 |
| P2.02 | Frequência nominal do motor | 3,00~400,00Hz | 12,73 |
| P2.03 | Velocidade nominal do motor | 1~3000rpm | 96 |
| P2.04 | Tensão nominal do motor | 0~460 V | 300 |
| P2.05 | Corrente nominal do motor | 0,1~1000,0A | 11.2 |
| P3,00 | Seleção do tipo de encoder | 0~6 | 6 |
| P3.01 | Resolução do encoder | 1~10000 | 1024 |
| P3,00 | Direção do encoder | 0: Entrada para frente | 0 |
| P4,00 | Ganho proporcional de baixa velocidade ASR | 0~100 | 30 |
| P4.02 | Tempo de filtro de detecção de baixa velocidade | 0~8 | 2 |
| P4.04 | Ganho proporcional de alta velocidade ASR | 0~100 | 20 |
| P4.06 | Tempo de filtro de detecção de alta velocidade | 0~8 | 2 |
| P4.08 | Coeficiente proporcional ACR P | 0~65535 | 600 |
| P4.10 | Coeficiente de filtro ACR | 0~65535 | 64 |
| P4.09 | Coeficiente integral ACR I | 0~65535 | 600 |
| P5.09 | Limite de desvio de velocidade excessiva | 0,1%~50,0% | 30,0 |
| P5.10 | Tempo de detecção de desvio de velocidade excessiva | 0,000~10,000 | 1.5 |
| A1.01 | Configuração total do piso | 2~64 | 5 |
| T0,04 | Atraso na abertura do freio | 0~5.000s | 0,600 |
| T0,05 | Atraso no fechamento do freio | 0~5.000s | 0,600 |
| T0,07 | Atraso de cancelamento de direção | 0~5.000s | 0,600 |
| T0,14 | Atraso de referência de velocidade | 0~5.000s | 0,600 |
| F0,00 | Detecção de alta/baixa tensão | 1: detecção somente de tensão mais baixa | 1 |
| F0.13 | Seleção de função da linha 2 | 35: Detecção de saída UPS | 35 |
| F0.18 | Seleção relativa de elevador em funcionamento | 1: ligar abaixo de 32 andares conectar à linha interna | 1 |
| F0.21 | Distância de nivelamento | 0~65535 | 100 |
| F0,22 | Aplicação UPS | 0: Fonte de alimentação 220V | 0 |
4. Vantagens
• Integração inteligente: EC160A é a combinação de controlador e inversor.
• Suporta métodos de comunicação duplos: comunicação serial e paralela.
• Simples e estável: 2 conjuntos de interface de comunicação CAN tornam o sistema simples, altamente eficiente e estável.
• Fácil depuração: O operador LCD com display de 10 linhas pode mostrar todas as informações do estado de execução. Isso torna a depuração mais fácil.
• Função ARD: Com UPS monofásico de 220 VCA, o EC160 pode ir até o andar mais próximo e abrir a porta quando a energia da rede estiver desligada.
IV. Conclusão
Após a modernização pelo EC160A, o elevador KONE funciona perfeitamente. O cliente está muito satisfeito. Isso prova que o monopólio pode ser quebrado. Mais e mais clientes escolherão o INVT EC160A para substituir o sistema KONE no futuro. O EC160A tem amplas perspectivas de mercado.






Nosso site utiliza cookies para oferecer a você uma melhor experiência de navegação. Ao continuar a navegar no site, você concorda com o uso de cookies de acordo com nossa Política de Cookies.














 Compartilhar
Compartilhar
 Facebook
Facebook
 Twitter
Twitter
 Google+
Google+
 LinkedIn
LinkedIn
 Voltar à lista
Voltar à lista




